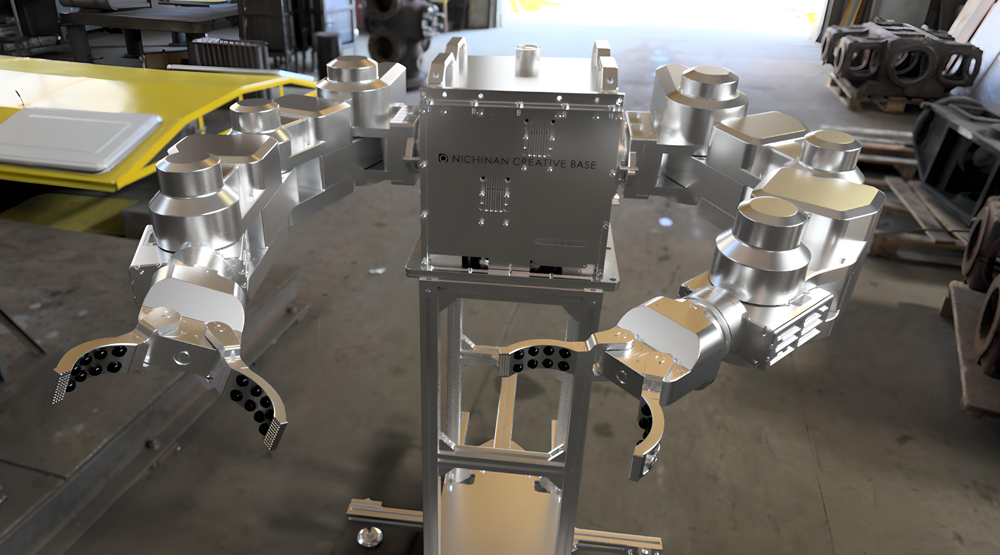
非定型作業を自動で行う双腕型スマート
ロボット(遠隔操作型ロボットアーム)
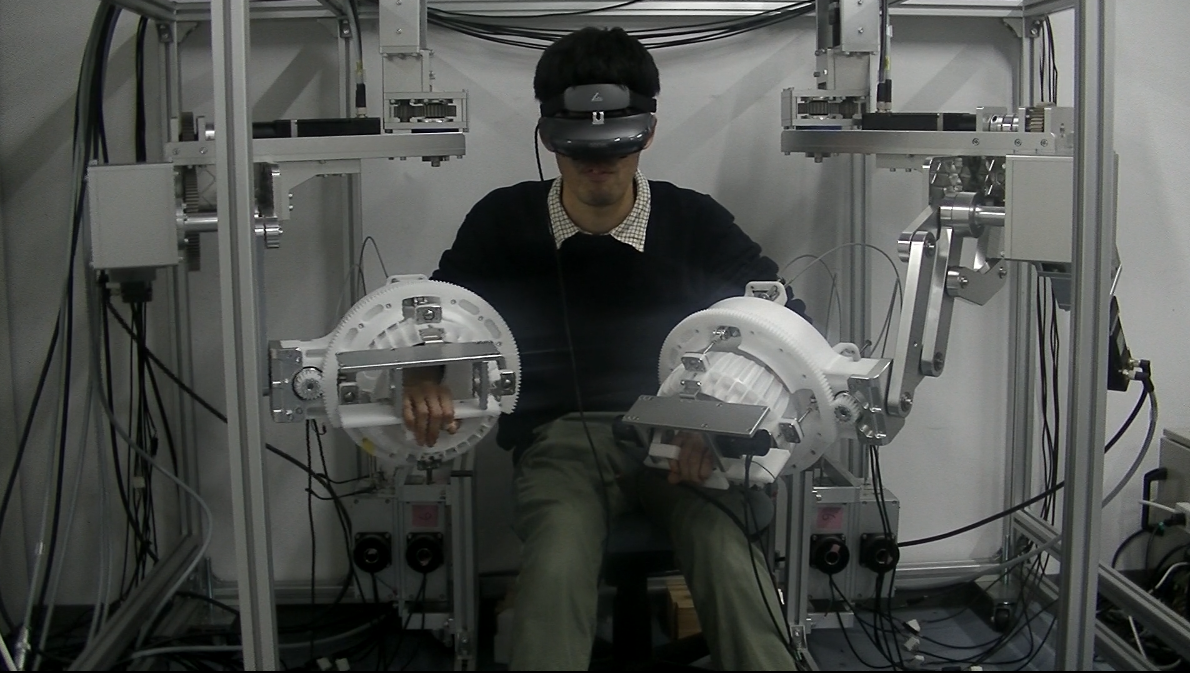
慶応義塾大学ハプティクス研究センター依頼のもと
設計・製作のサポートを行った、
リアルハプティクス技術を用いた遠隔操作ロボットになります。
操作を行うマスター機と、その制御下で動作するスレーブ機の
2つに分かれており、今回はマスター側のサポートと
して携わらせていただきました。
災害対応ロボット・インフラ整備ロボット・介護ロボット・ヒューマノイドロボット・パーソナルモビリティ
ロボットに求められる機能、ロボットによる作業目的やミッションを実現するためのロボティクス技術による
開発支援を主体に、製品化に向けた活動を実施しています。
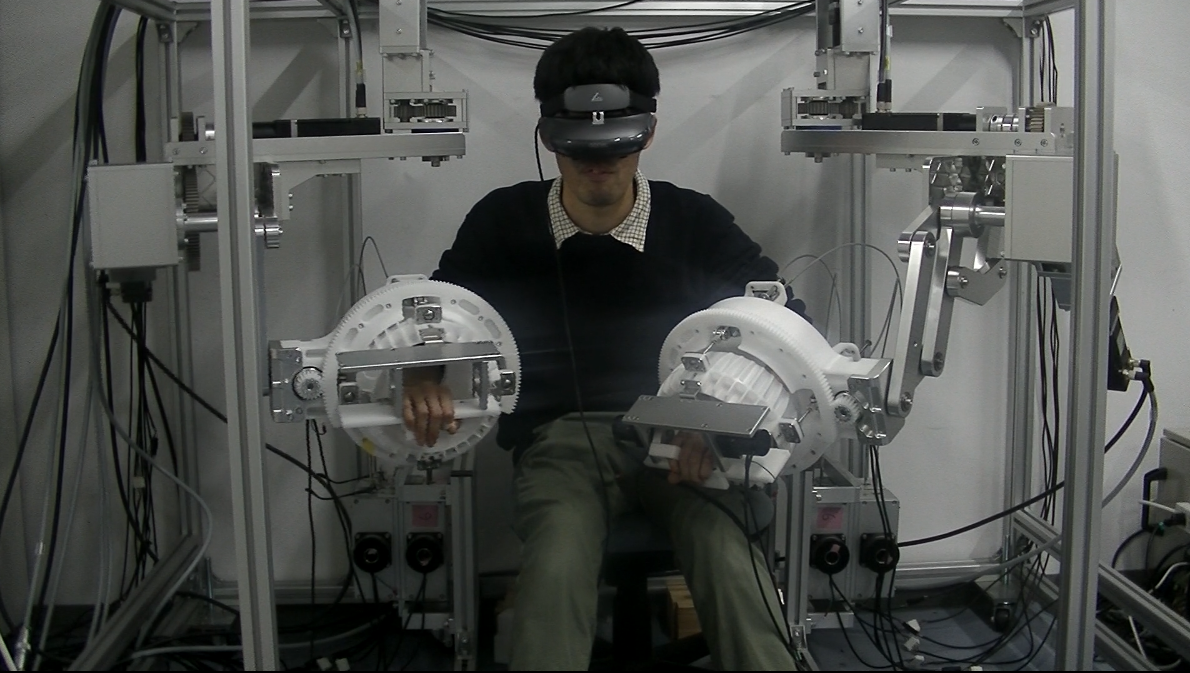


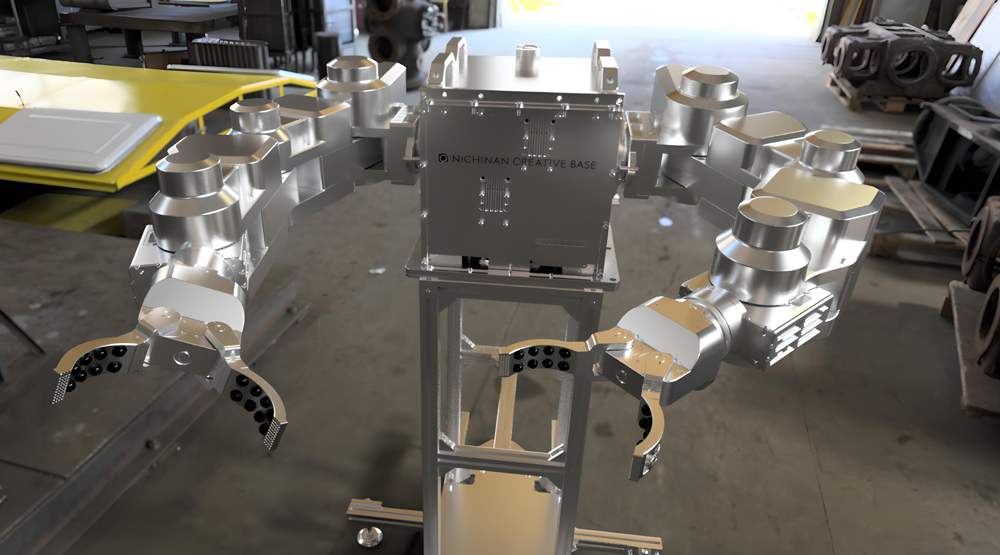
慶応義塾大学ハプティクス研究センター依頼のもと
設計・製作のサポートを行った、
リアルハプティクス技術を用いた遠隔操作ロボットになります。
操作を行うマスター機と、その制御下で動作するスレーブ機の
2つに分かれており、今回はマスター側のサポートと
して携わらせていただきました。
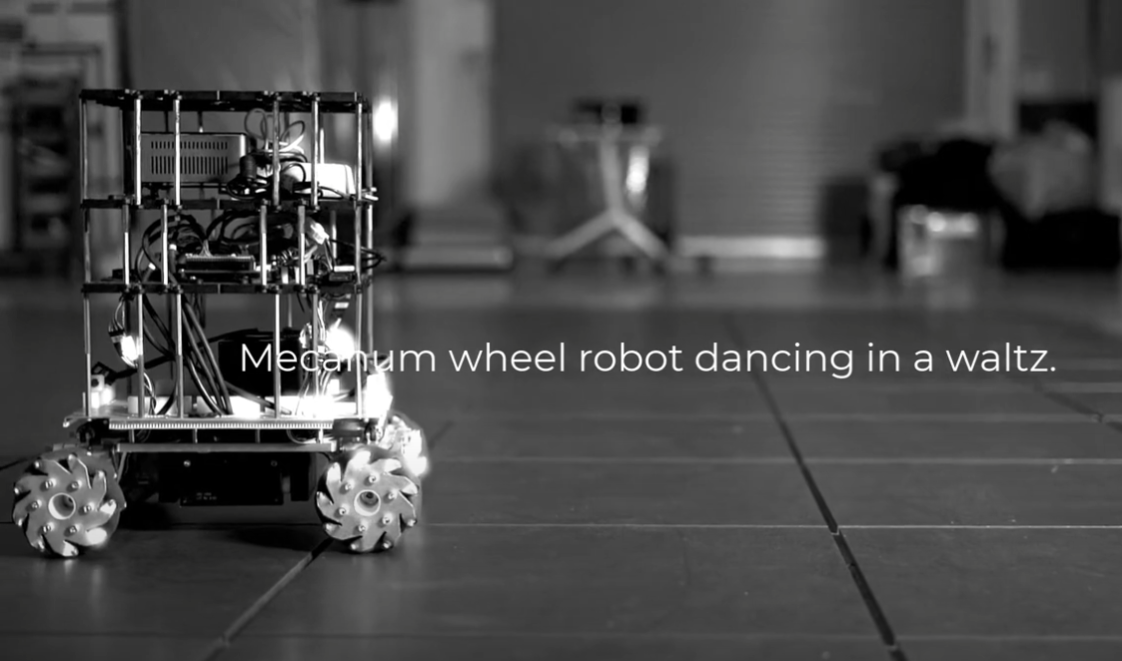
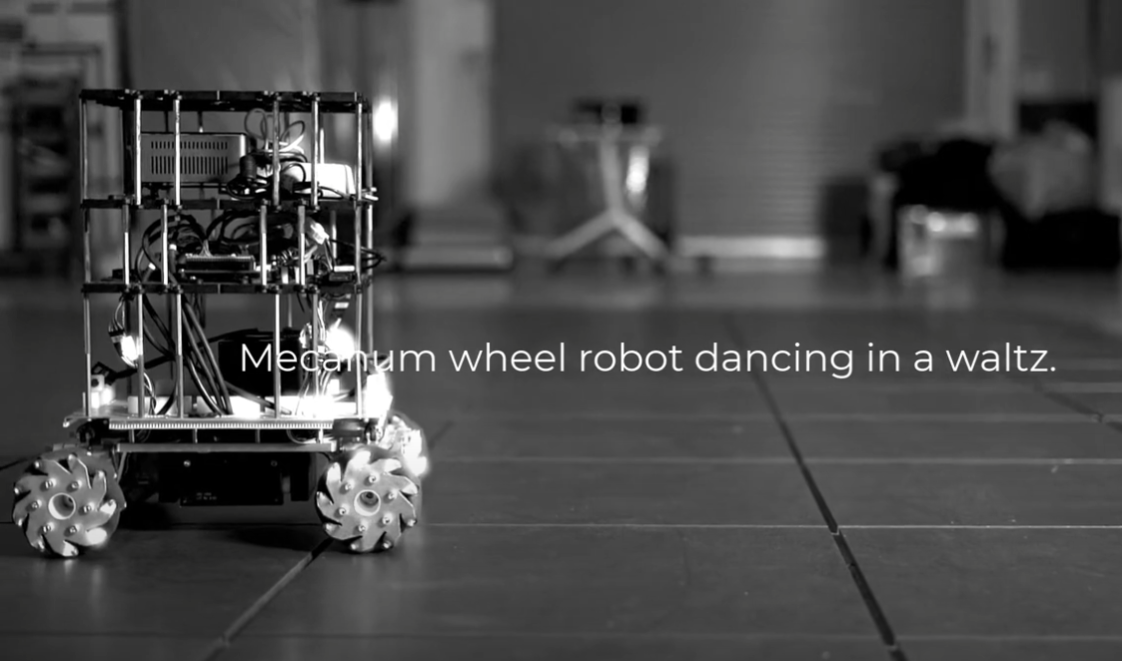
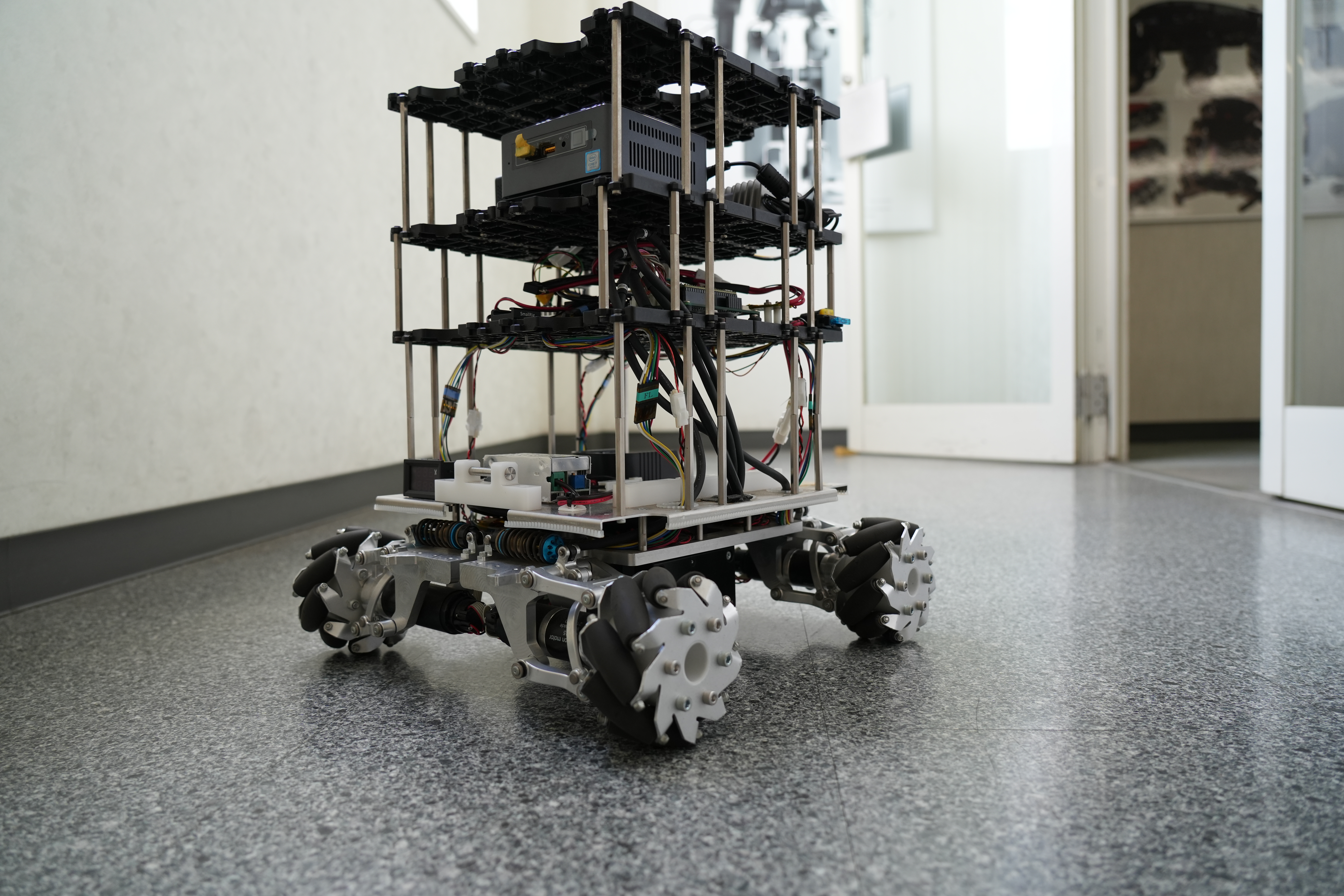
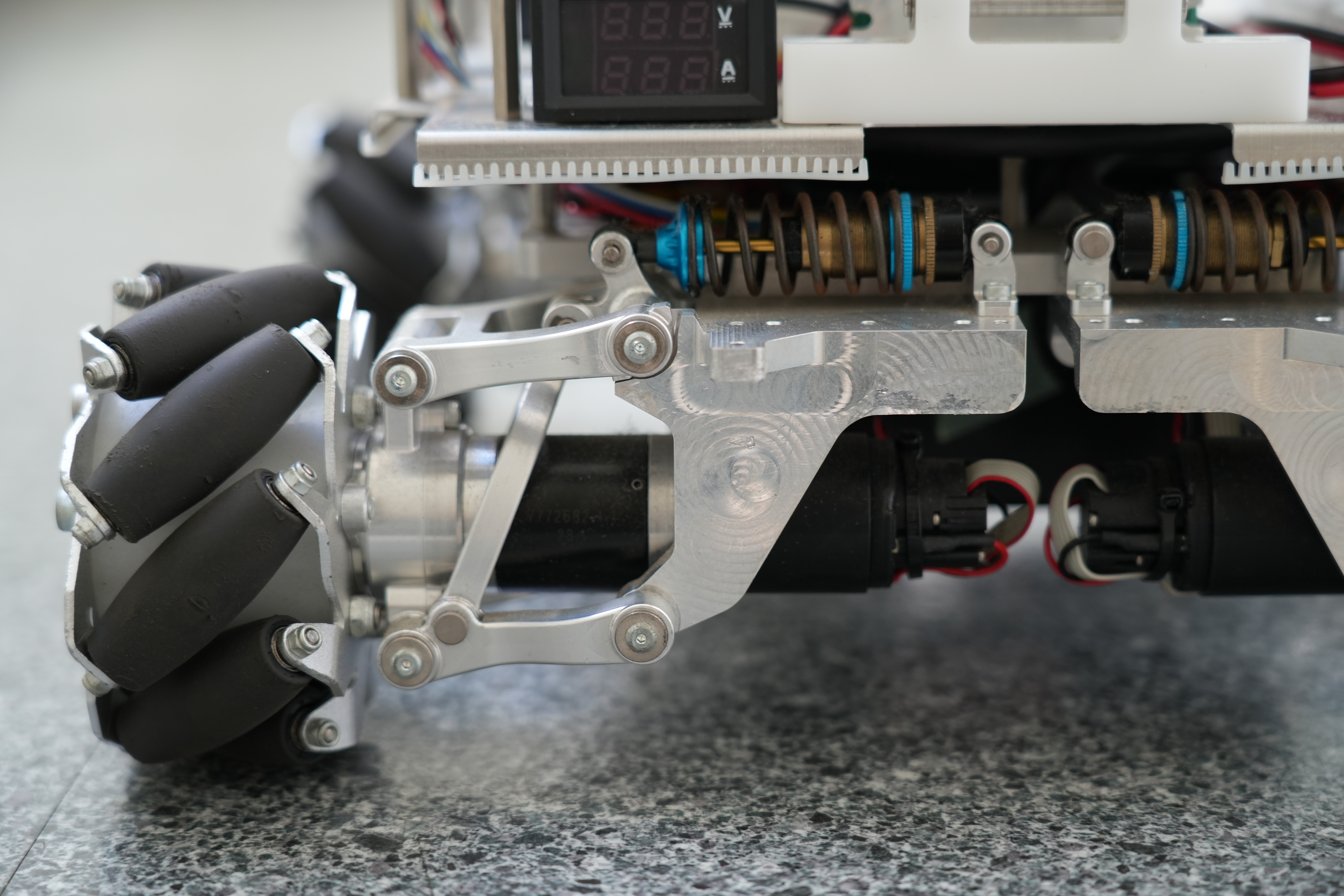
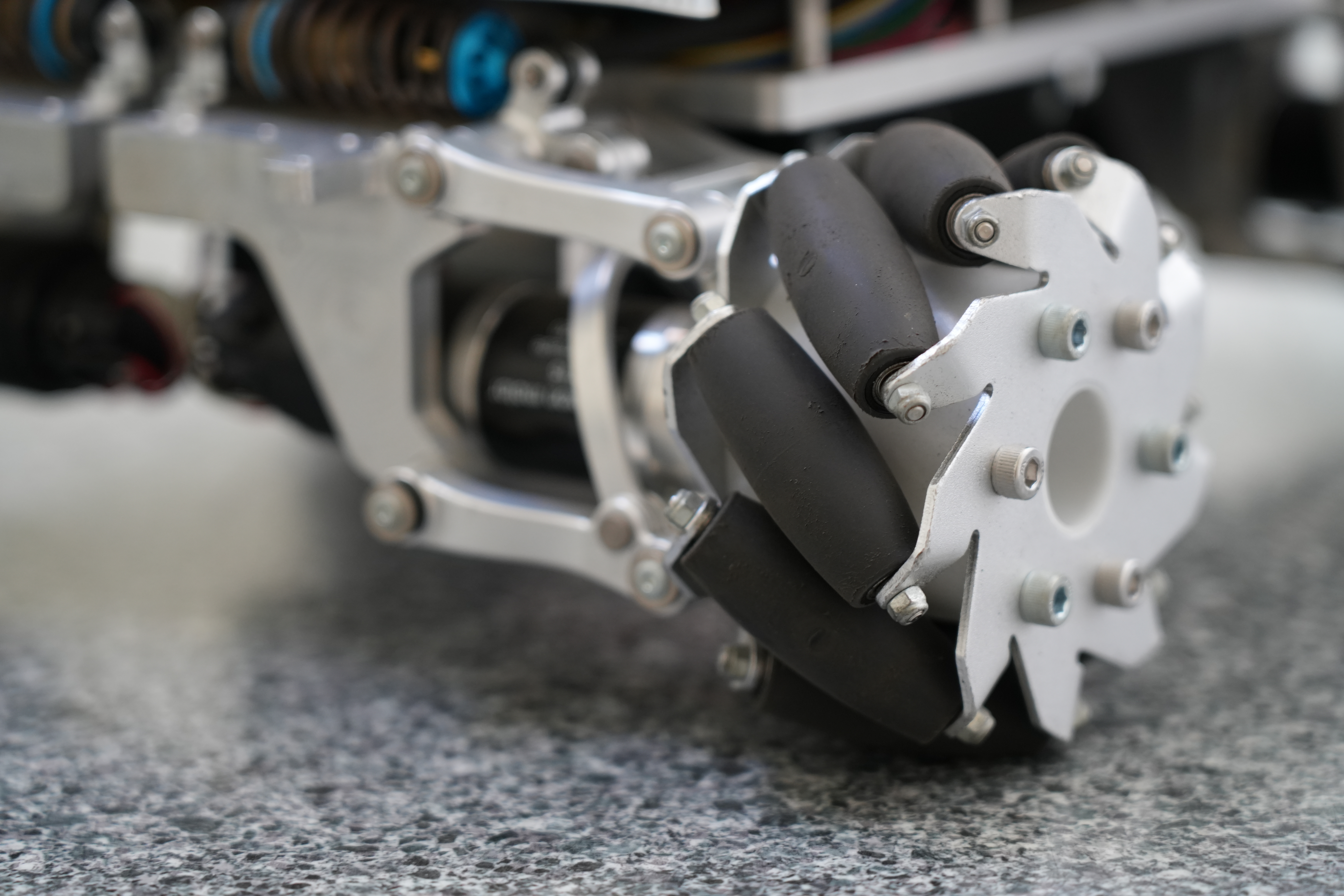
このロボットはメカナムホイールを搭載しており、 各ホイールの回転速度を個別に制御することで 姿勢 を維持したまま前後左右斜め移動や超信地旋回も可能 としています。 また、高速安定移動を実現するためにサスペンションは自社設計によるダブルウィッシュボ ーン機構を採用した アルミ切削加工による設計製作を行っています。 ホイールは摩擦係数を適切に調整した樹脂を「自社金型成型」で設計製作しています。 制御はUnityで制御アプリケーションを製作し、自立制御や遠隔操作も可能となっております。





日本原子力発電・原子力緊急事態支援センターに導入され、実用化に成功した災害偵察ロボット SAKURA-1 R2 ⇒ SAKURA-1 R3 ⇒ SAKURA-1 R4・・・ 顧客の運用ニーズに都度対応することで、バージョンアップ毎に進化を続けます。





弊社顧客のTBグローバルテクノロジーズ株式会社様の運搬特化型の協働ロボットCoRoCo-S100と弊社の持つ自律走行技術の小さなロボットが誘導するというコラボレーションで柔軟で手軽な運搬ロボットシステムを具現化しました。自律走行ロボットのデザイン・ボディー製作は全て内製で完結させています。

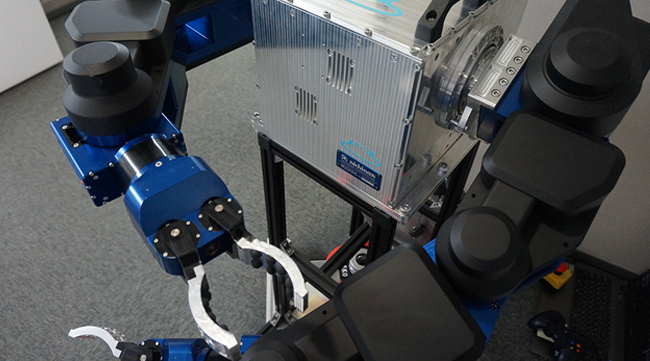
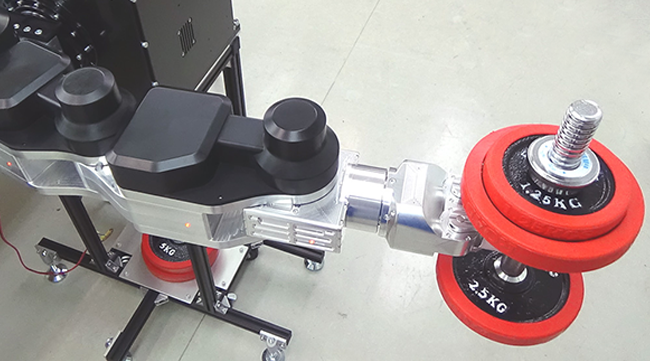
株式会社アトックス様向け双腕ロボットアーム (可搬重量15kgを目標とした実験機)


